Dimanche matin, les OBS sont tous à l’eau, c’est au tour des engins sous-marins d’aller explorer le massif de Rainbow. Pour le début de mission, IdefX sortira en journée, et Victor durant la nuit. L’AUV volera au dessus du plancher océanique de manière autonome, tandis que le ROV sera piloté depuis le navire.





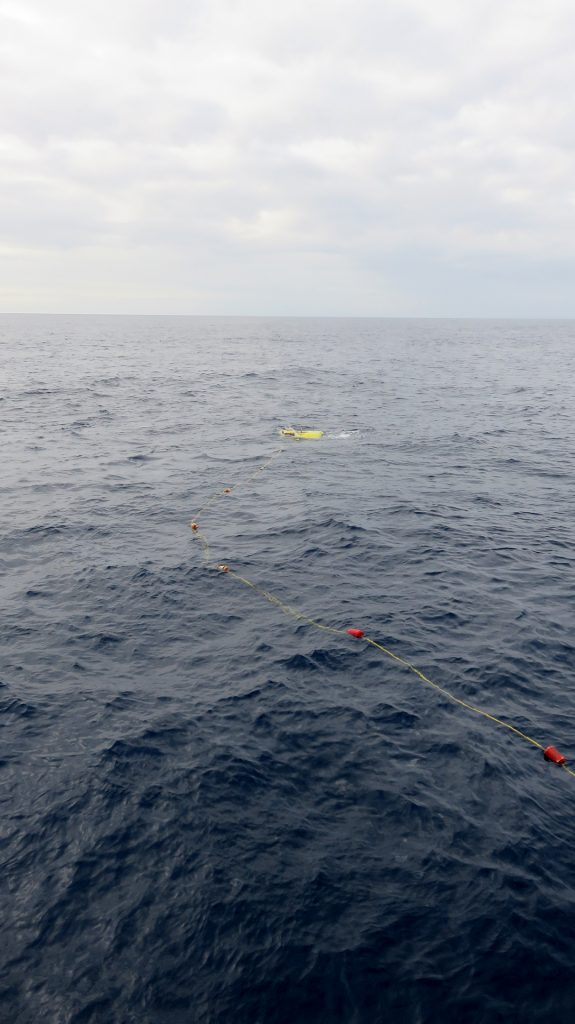
18h. Après une journée de vol à moins de 100 m du plancher océanique, soit plus de 2000 m de profondeur, pour cartographier la zone, voilà IdefX qui émerge au loin. Son antenne wifi permet de le télécommander pour rentrer au bateau. Mais les communications ne s’arrêtent jamais entre l’AUV IdefX et le Pourquoi Pas ?

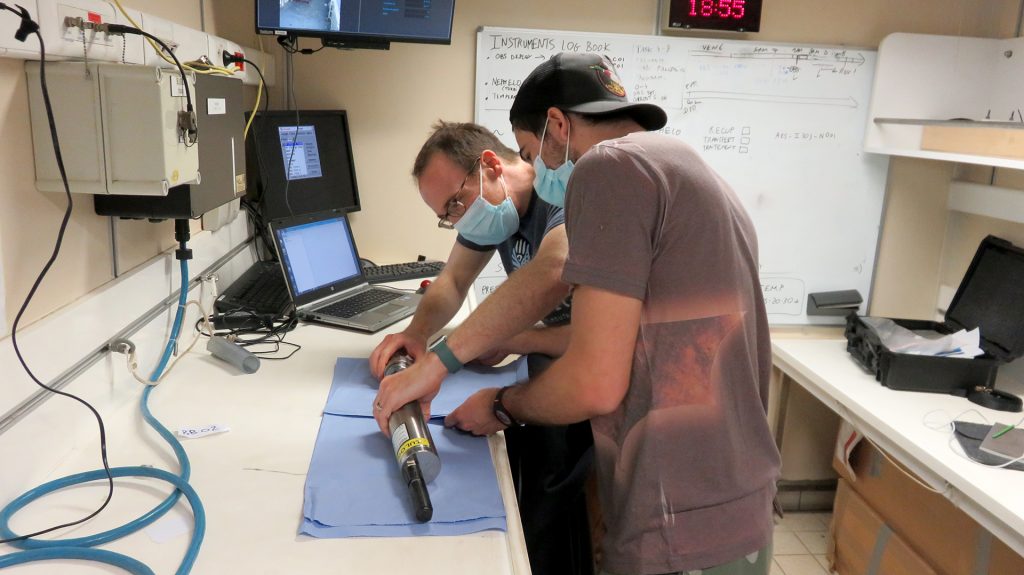
Rinçage et séchage du capteur néphélométrique qui, fixé à l’AUV, a mesuré la turbidité de l’eau sur la zone. Les données de bathymétrie ne seront pas disponibles avant plusieurs heures, mais la sonde va parler rapidement. Jean-Arthur et Antoine seront donc les premiers à avoir un signal. Qui les connait peut imaginer le niveau de fébrilité !


Non, Antoine ne pêche pas. Avec Manon, ils appellent les OBS à l’aide d’un hydrophone. Ces derniers sont descendus seuls au fond de l’eau et nous avons besoin de les relocaliser par triangulation. Nous profitons donc d’être dans la zone où l’un d’eux a été largué pour lui envoyer un signal acoustique. Il nous répond. Nous savons maintenant où il est tombé.


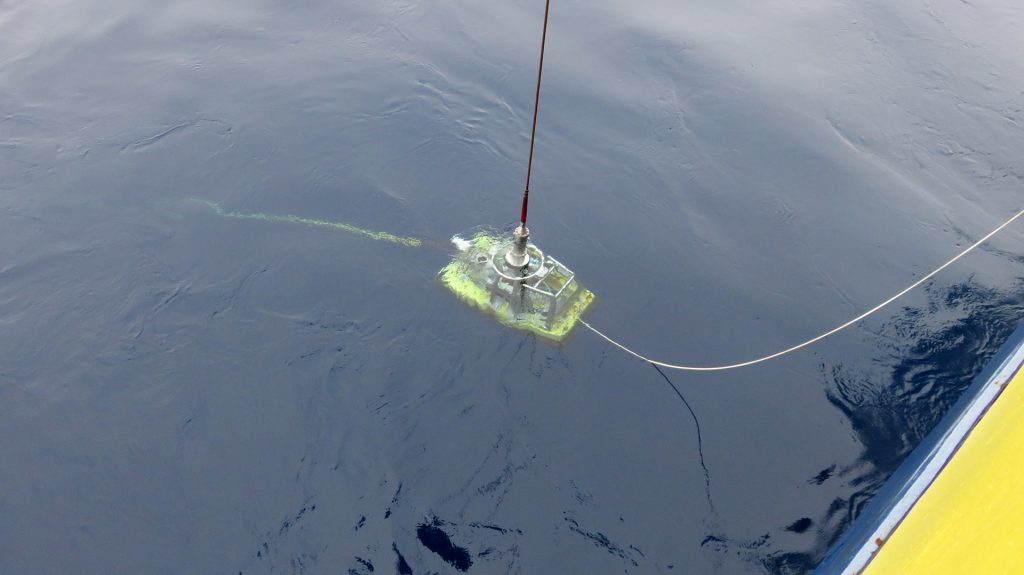
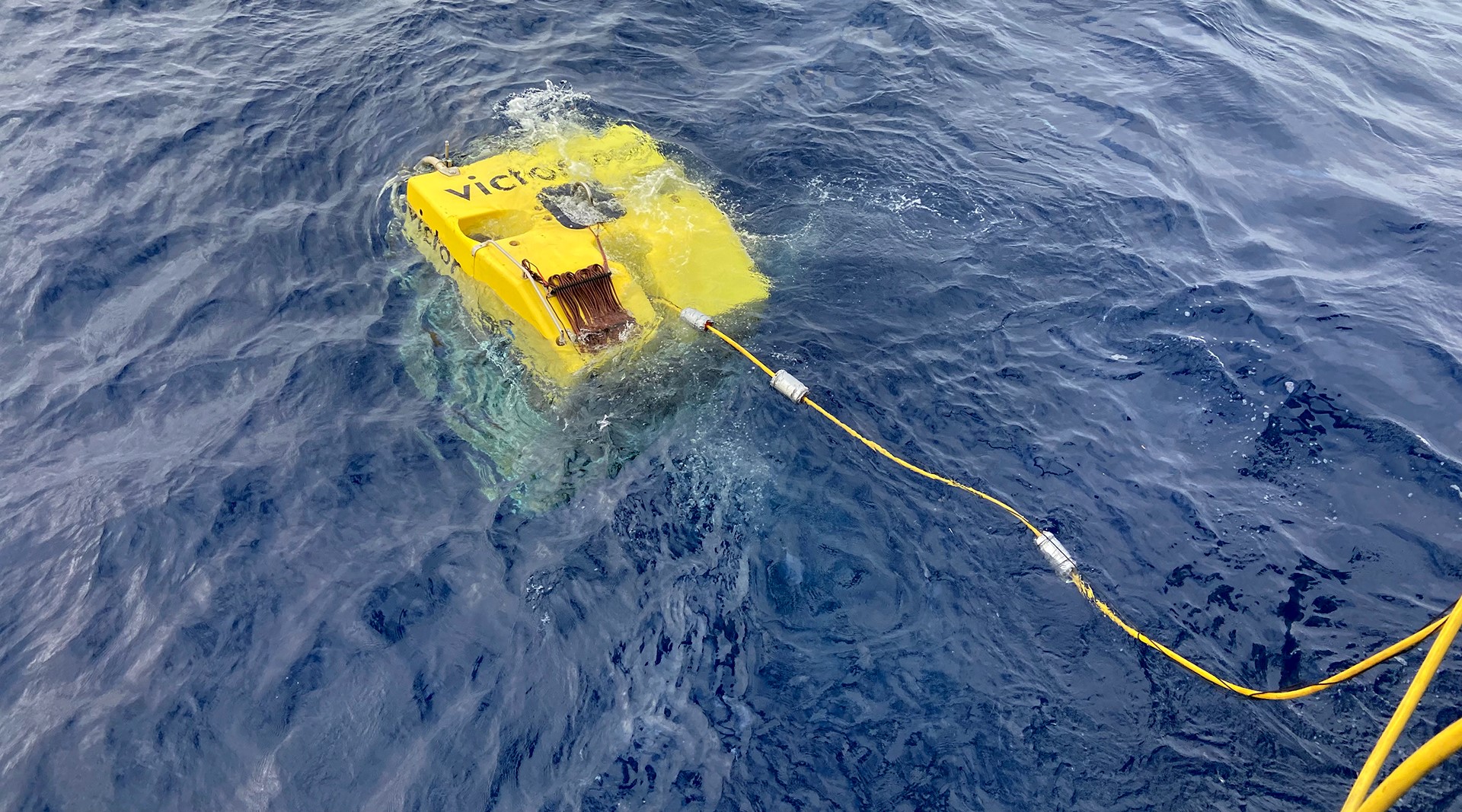
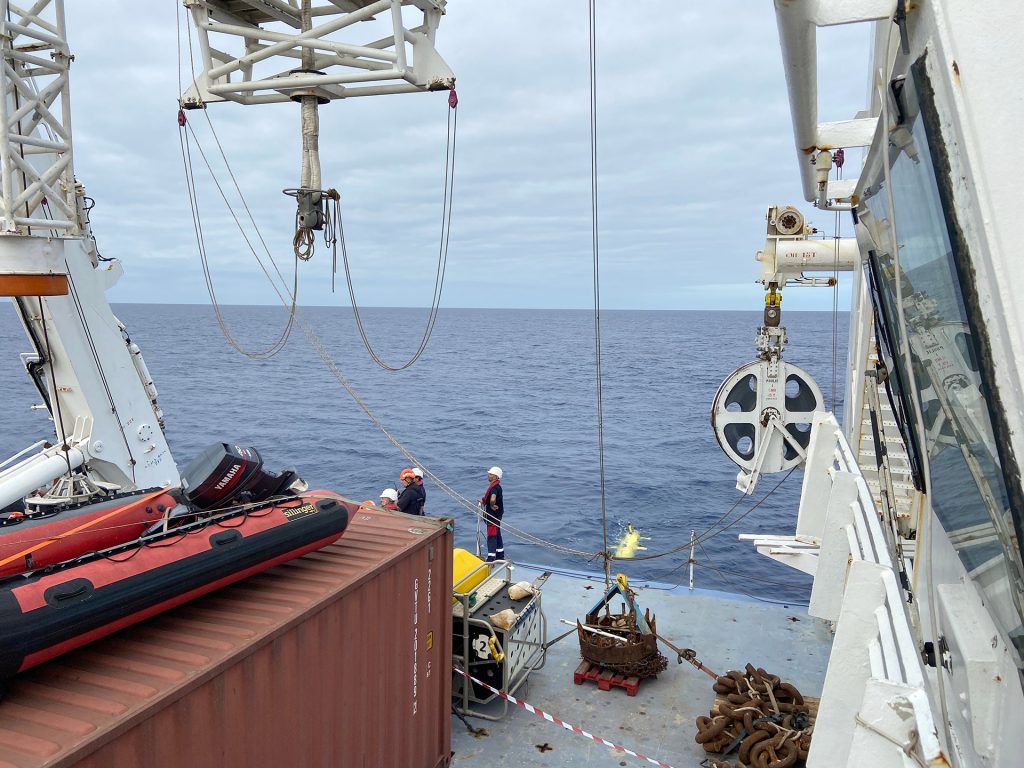
19h. C’est au tour de Victor d’être mis à l’eau. Il s’éloigne du bateau à la dérive, au bout de sa laisse qui le rattache à son lest. Ce dernier est ensuite descendu jusque sur le plancher océanique, à plus de 2000 m de profondeur. Victor pourra se promener aux alentours, diriger depuis la surface à travers le câble en fibre optique.

À demain Victor !!