Sunday morning, the OBS are all in the water, it’s the underwater vehicles’ turn to explore the Rainbow massif. For the start of the mission, IdefX will go out during the day, and Victor during the night. The AUV will fly autonomously over the seafloor, while the ROV will be piloted from the ship.





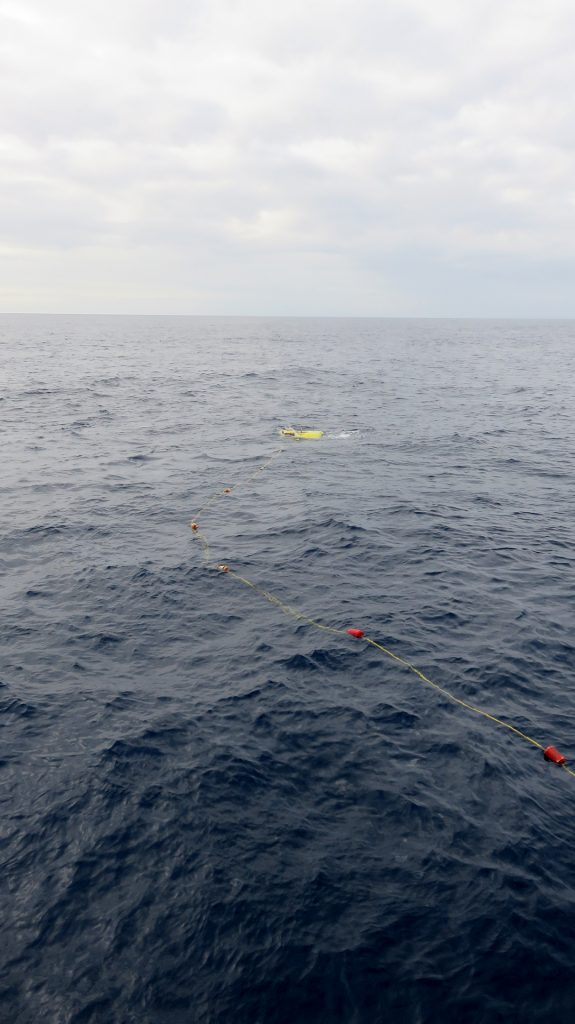
6 pm. After a day of flying less than 100 m from the ocean floor, i.e. more than 2000 m deep, to map the area, IdefX emerges in the distance. Its wifi antenna allows it to be remotely controlled to return to the boat. But communications never stop between the IdefX AUV and the Pourquoi Pas ?

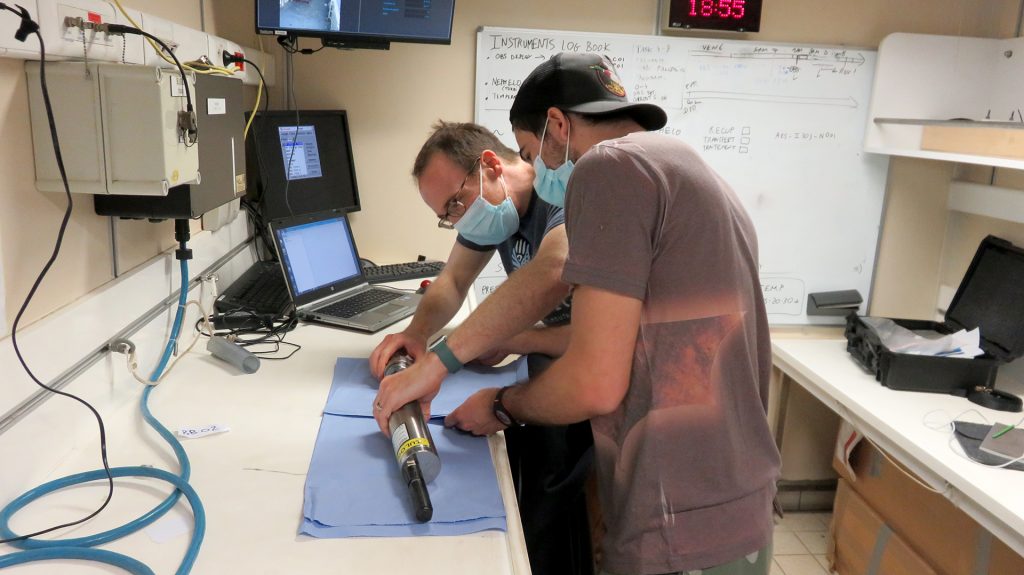
Rinsing and drying of the nephelometric sensor which, attached to the AUV, measured the turbidity of the water in the area. The bathymetry data will not be available before several hours, but the sensor will speak quickly. Jean-Arthur and Antoine will be the first to get a signal. Anyone who knows them can imagine how excited they are!


No, Antoine is not fishing. With Manon, they call the OBS with a hydrophone. The latter have descended alone to the bottom of the water and we need to relocate them by triangulation. We take advantage of being in the area where one of them was dropped to send him an acoustic signal. It responds to us. We now know where it fell.


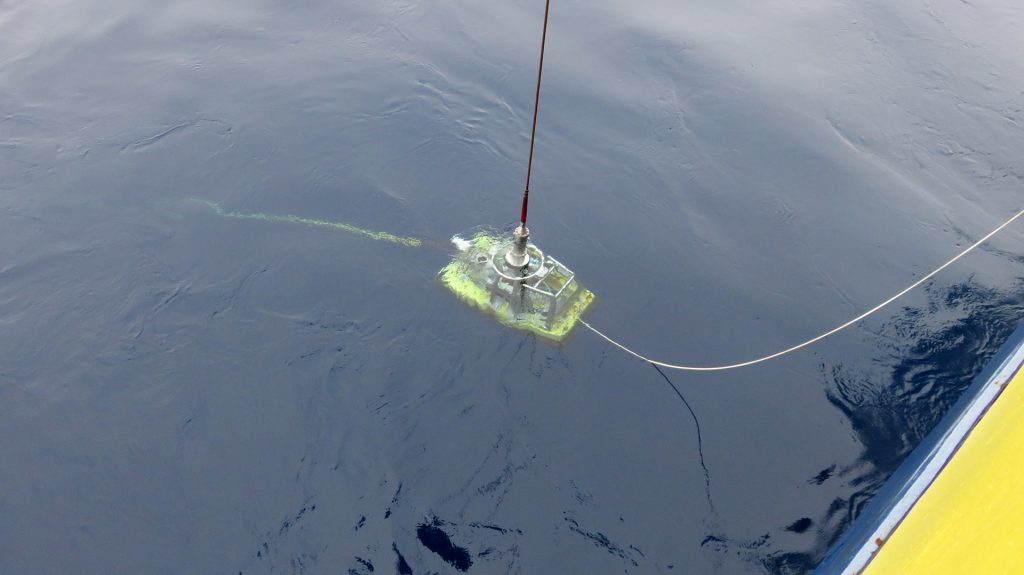
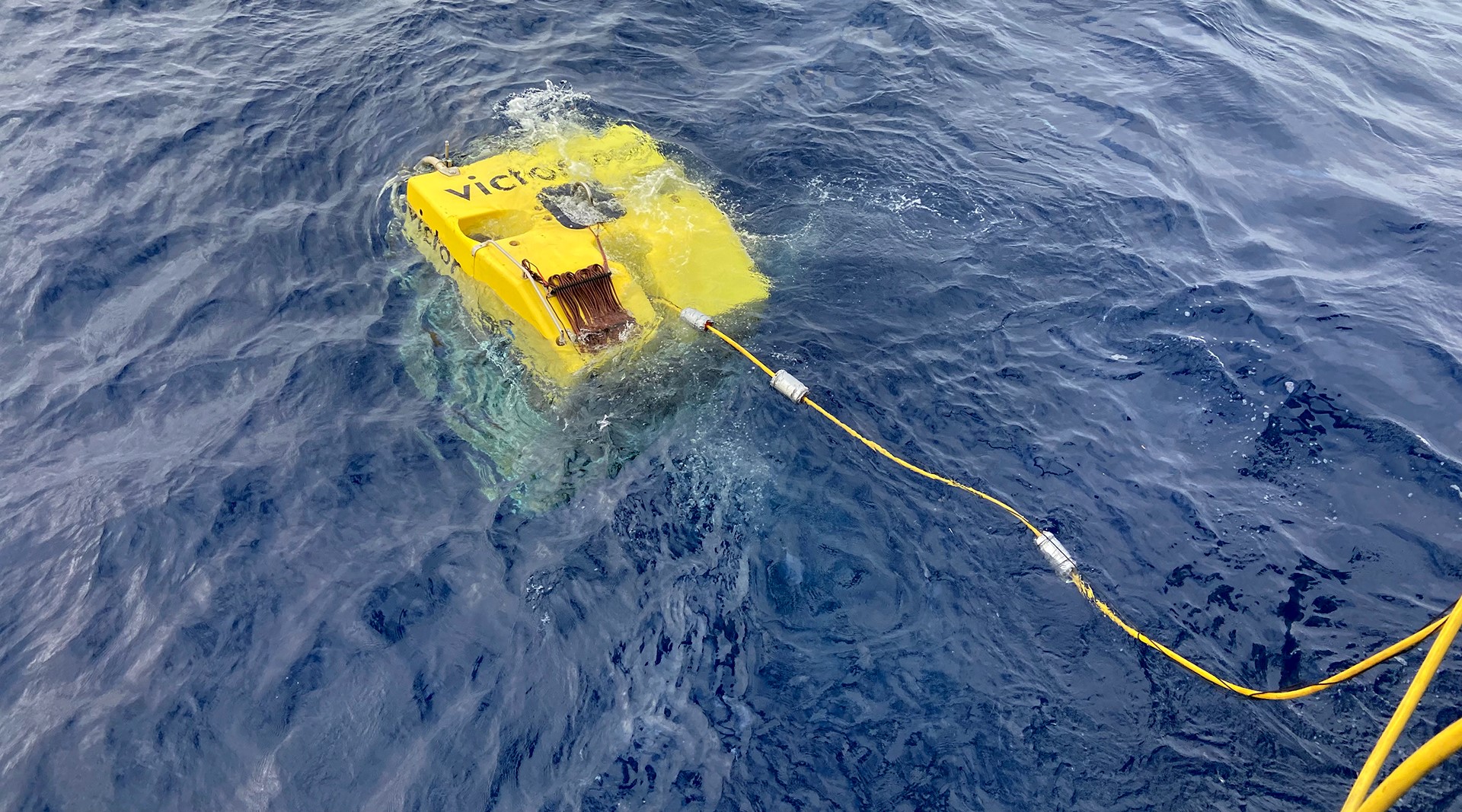
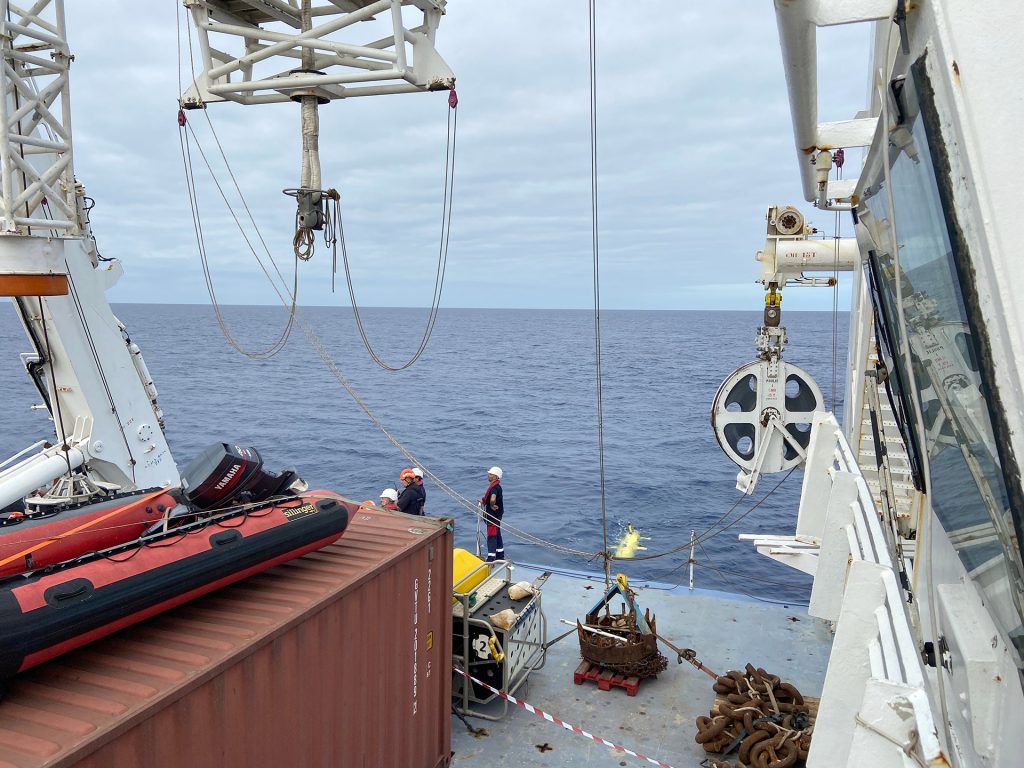
7 pm. It is Victor’s turn to be launched. He drifted away from the boat, at the end of his leash which attached him to his ballast. The ballast is then lowered to the ocean floor, at a depth of more than 2000 m. Victor will be able to walk around, directed from the surface through the optical fibre cable.

See you tomorrow Victor!